|
OpenWalnut
1.5.0dev
|
|
OpenWalnut
1.5.0dev
|
class to provide conversions between world or voxel space coordinates und Talairach coordinates More...
#include <WTalairachConverter.h>
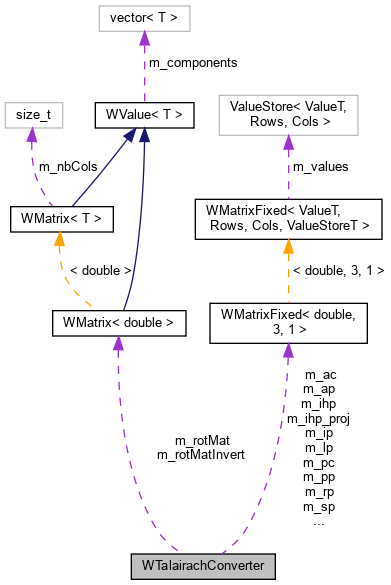
 Collaboration diagram for WTalairachConverter:
Collaboration diagram for WTalairachConverter:Public Member Functions | |
| WTalairachConverter (WVector3d ac, WVector3d pc, WVector3d ihp) | |
| constructor More... | |
| virtual | ~WTalairachConverter () |
| destructor More... | |
| WVector3d | Canonical2ACPC (const WVector3d point) |
| Canonical2ACPC. More... | |
| WVector3d | ACPC2Canonical (const WVector3d point) |
| ACPC2Canonical. More... | |
| WVector3d | Canonical2Talairach (const WVector3d point) |
| Canonical2Talairach. More... | |
| WVector3d | Talairach2Canonical (const WVector3d point) |
| Talairach2Canonical. More... | |
| WVector3d | ACPC2Talairach (const WVector3d point) |
| ACPC2Talairach. More... | |
| WVector3d | Talairach2ACPC (const WVector3d point) |
| Talairach2ACPC. More... | |
| WVector3d | getAc () const |
| getter for ac More... | |
| void | setAc (WVector3d ac) |
| setter for ac More... | |
| WVector3d | getPc () const |
| getter for pc More... | |
| void | setPc (WVector3d pc) |
| setter for pc More... | |
| WVector3d | getIhp () const |
| getter for ihp More... | |
| void | setIhp (WVector3d ihp) |
| setter for ihp More... | |
| WVector3d | getAp () const |
| getter for ap More... | |
| void | setAp (WVector3d ap) |
| setter for ap More... | |
| WVector3d | getPp () const |
| getter for pp More... | |
| void | setPp (WVector3d pp) |
| setter for pp More... | |
| WVector3d | getSp () const |
| getter for sp More... | |
| void | setSp (WVector3d sp) |
| setter for sp More... | |
| WVector3d | getIp () const |
| getter for ip More... | |
| void | setIp (WVector3d ip) |
| setter for ip More... | |
| WVector3d | getRp () const |
| getter for rp More... | |
| void | setRp (WVector3d rp) |
| setter for rp More... | |
| WVector3d | getLp () const |
| getter for lp More... | |
| void | setLp (WVector3d lp) |
| setter for lp More... | |
| WMatrix< double > | getRotMat () |
| getter for the rotation matrix More... | |
| WMatrix< double > | getInvRotMat () |
| getter for the inverted rotation matrix More... | |
Public Attributes | |
| WVector3d | m_ihp_proj |
| projected interhemispherical point More... | |
Private Member Functions | |
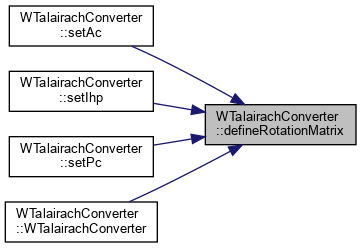
| void | defineRotationMatrix () |
| helper routine to create the rotation matrix from the given points More... | |
Private Attributes | |
| WMatrix< double > | m_rotMat |
| the rotation matrix More... | |
| WMatrix< double > | m_rotMatInvert |
| the inverted rotation matrix More... | |
| WVector3d | m_ac |
| anterior commisure More... | |
| WVector3d | m_pc |
| inferior commisure More... | |
| WVector3d | m_ihp |
| inter hemispherical point More... | |
| WVector3d | m_ap |
| anterior point More... | |
| WVector3d | m_pp |
| posterior point More... | |
| WVector3d | m_sp |
| superior point More... | |
| WVector3d | m_ip |
| inferior point More... | |
| WVector3d | m_rp |
| right point More... | |
| WVector3d | m_lp |
| left point More... | |
class to provide conversions between world or voxel space coordinates und Talairach coordinates
Definition at line 37 of file WTalairachConverter.h.
constructor
| ac | anterior point |
| pc | posterior point |
| ihp | interhemispherical plane |
Definition at line 28 of file WTalairachConverter.cpp.
References defineRotationMatrix(), m_ap, m_ip, m_lp, m_pp, m_rp, and m_sp.
Here is the call graph for this function:
|
virtual |
destructor
Definition at line 51 of file WTalairachConverter.cpp.
ACPC2Canonical.
| point | the coordinates to transform |
Definition at line 61 of file WTalairachConverter.cpp.
References m_ac, and m_rotMatInvert.
Referenced by Talairach2Canonical().
Here is the caller graph for this function:Canonical2ACPC.
| point | the coordinates to transform |
Definition at line 55 of file WTalairachConverter.cpp.
References m_ac, and m_rotMat.
Referenced by Canonical2Talairach().
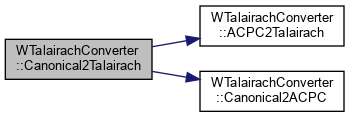
Here is the caller graph for this function:Canonical2Talairach.
| point | the coordinates to transform |
Definition at line 67 of file WTalairachConverter.cpp.
References ACPC2Talairach(), and Canonical2ACPC().
Here is the call graph for this function:
|
private |
helper routine to create the rotation matrix from the given points
Definition at line 217 of file WTalairachConverter.cpp.
References m_ac, m_ihp, m_ihp_proj, m_pc, m_rotMat, and m_rotMatInvert.
Referenced by setAc(), setIhp(), setPc(), and WTalairachConverter().
Here is the caller graph for this function:| WVector3d WTalairachConverter::getAc | ( | ) | const |
getter for ac
Definition at line 249 of file WTalairachConverter.cpp.
References m_ac.
| WVector3d WTalairachConverter::getAp | ( | ) | const |
getter for ap
Definition at line 282 of file WTalairachConverter.cpp.
References m_ap.
| WVector3d WTalairachConverter::getIhp | ( | ) | const |
getter for ihp
Definition at line 271 of file WTalairachConverter.cpp.
References m_ihp.
| WMatrix< double > WTalairachConverter::getInvRotMat | ( | ) |
getter for the inverted rotation matrix
Definition at line 347 of file WTalairachConverter.cpp.
References m_rotMatInvert.
| WVector3d WTalairachConverter::getIp | ( | ) | const |
getter for ip
Definition at line 312 of file WTalairachConverter.cpp.
References m_ip.
| WVector3d WTalairachConverter::getLp | ( | ) | const |
getter for lp
Definition at line 332 of file WTalairachConverter.cpp.
References m_lp.
| WVector3d WTalairachConverter::getPc | ( | ) | const |
getter for pc
Definition at line 260 of file WTalairachConverter.cpp.
References m_pc.
| WVector3d WTalairachConverter::getPp | ( | ) | const |
getter for pp
Definition at line 292 of file WTalairachConverter.cpp.
References m_pp.
| WMatrix< double > WTalairachConverter::getRotMat | ( | ) |
getter for the rotation matrix
Definition at line 342 of file WTalairachConverter.cpp.
References m_rotMat.
| WVector3d WTalairachConverter::getRp | ( | ) | const |
getter for rp
Definition at line 322 of file WTalairachConverter.cpp.
References m_rp.
| WVector3d WTalairachConverter::getSp | ( | ) | const |
getter for sp
Definition at line 302 of file WTalairachConverter.cpp.
References m_sp.
| void WTalairachConverter::setAc | ( | WVector3d | ac | ) |
setter for ac
| ac | coordinate of point |
Definition at line 254 of file WTalairachConverter.cpp.
References defineRotationMatrix(), and m_ac.
Here is the call graph for this function:| void WTalairachConverter::setAp | ( | WVector3d | ap | ) |
setter for ap
| ap | coordinate of point |
Definition at line 287 of file WTalairachConverter.cpp.
References m_ap.
| void WTalairachConverter::setIhp | ( | WVector3d | ihp | ) |
setter for ihp
| ihp | coordinate of point |
Definition at line 276 of file WTalairachConverter.cpp.
References defineRotationMatrix(), and m_ihp.
Here is the call graph for this function:| void WTalairachConverter::setIp | ( | WVector3d | ip | ) |
setter for ip
| ip | coordinate of point |
Definition at line 317 of file WTalairachConverter.cpp.
References m_ip.
| void WTalairachConverter::setLp | ( | WVector3d | lp | ) |
setter for lp
| lp | coordinate of point |
Definition at line 337 of file WTalairachConverter.cpp.
References m_lp.
| void WTalairachConverter::setPc | ( | WVector3d | pc | ) |
setter for pc
| pc | coordinate of point |
Definition at line 265 of file WTalairachConverter.cpp.
References defineRotationMatrix(), and m_pc.
Here is the call graph for this function:| void WTalairachConverter::setPp | ( | WVector3d | pp | ) |
setter for pp
| pp | coordinate of point |
Definition at line 297 of file WTalairachConverter.cpp.
References m_pp.
| void WTalairachConverter::setRp | ( | WVector3d | rp | ) |
setter for rp
| rp | coordinate of point |
Definition at line 327 of file WTalairachConverter.cpp.
References m_rp.
| void WTalairachConverter::setSp | ( | WVector3d | sp | ) |
setter for sp
| sp | coordinate of point |
Definition at line 307 of file WTalairachConverter.cpp.
References m_sp.
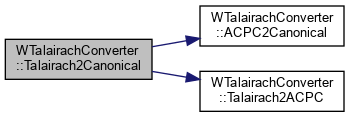
Talairach2Canonical.
| point | the coordinates to transform |
Definition at line 72 of file WTalairachConverter.cpp.
References ACPC2Canonical(), and Talairach2ACPC().
Here is the call graph for this function:
|
private |
anterior commisure
Definition at line 262 of file WTalairachConverter.h.
Referenced by ACPC2Canonical(), ACPC2Talairach(), Canonical2ACPC(), defineRotationMatrix(), getAc(), setAc(), and Talairach2ACPC().
|
private |
anterior point
Definition at line 266 of file WTalairachConverter.h.
Referenced by ACPC2Talairach(), getAp(), setAp(), Talairach2ACPC(), and WTalairachConverter().
|
private |
inter hemispherical point
Definition at line 264 of file WTalairachConverter.h.
Referenced by defineRotationMatrix(), getIhp(), and setIhp().
| WVector3d WTalairachConverter::m_ihp_proj |
projected interhemispherical point
Definition at line 251 of file WTalairachConverter.h.
Referenced by defineRotationMatrix().
|
private |
inferior point
Definition at line 269 of file WTalairachConverter.h.
Referenced by ACPC2Talairach(), getIp(), setIp(), Talairach2ACPC(), and WTalairachConverter().
|
private |
left point
Definition at line 271 of file WTalairachConverter.h.
Referenced by ACPC2Talairach(), getLp(), setLp(), Talairach2ACPC(), and WTalairachConverter().
|
private |
inferior commisure
Definition at line 263 of file WTalairachConverter.h.
Referenced by ACPC2Talairach(), defineRotationMatrix(), getPc(), setPc(), and Talairach2ACPC().
|
private |
posterior point
Definition at line 267 of file WTalairachConverter.h.
Referenced by ACPC2Talairach(), getPp(), setPp(), Talairach2ACPC(), and WTalairachConverter().
|
private |
the rotation matrix
Definition at line 259 of file WTalairachConverter.h.
Referenced by Canonical2ACPC(), defineRotationMatrix(), and getRotMat().
|
private |
the inverted rotation matrix
Definition at line 260 of file WTalairachConverter.h.
Referenced by ACPC2Canonical(), defineRotationMatrix(), and getInvRotMat().
|
private |
right point
Definition at line 270 of file WTalairachConverter.h.
Referenced by ACPC2Talairach(), getRp(), setRp(), Talairach2ACPC(), and WTalairachConverter().
|
private |
superior point
Definition at line 268 of file WTalairachConverter.h.
Referenced by ACPC2Talairach(), getSp(), setSp(), Talairach2ACPC(), and WTalairachConverter().