|
OpenWalnut
1.5.0dev
|
|
OpenWalnut
1.5.0dev
|
Class to provide conversion for a given coordinate in 3D space. More...
#include <WCoordConverter.h>
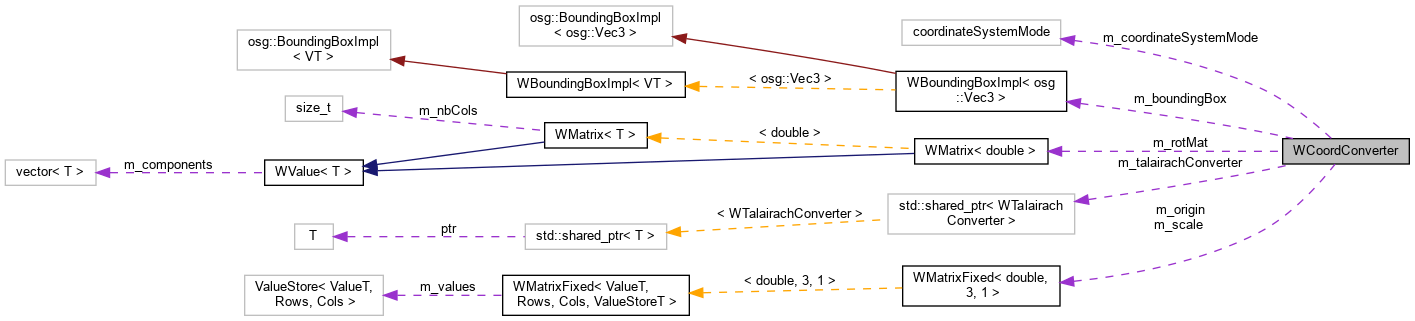
 Collaboration diagram for WCoordConverter:
Collaboration diagram for WCoordConverter:Public Member Functions | |
| WCoordConverter (WMatrix< double > rotMat, WVector3d origin=WVector3d(0, 0, 0), WVector3d scale=WVector3d(1.0, 1.0, 1.0)) | |
| standard constructor More... | |
| virtual | ~WCoordConverter () |
| destructor More... | |
| WVector3d | operator() (WVector3d in) |
| Operator () More... | |
| WVector3d | worldCoordTransformed (WPosition point) |
| Transforms world coordinates. More... | |
| WBoundingBox | getBoundingBox () |
| Gets the bounding box. More... | |
| void | setBoundingBox (WBoundingBox boundingBox) |
| Sets the bounding box of the volume. More... | |
| void | setCoordinateSystemMode (coordinateSystemMode mode) |
| setter for coordinate system mode More... | |
| coordinateSystemMode | getCoordinateSystemMode () |
| getter for coordinate system mode More... | |
| int | numberToCsX (int number) |
| converts a number on the x axis according to the currently selected coordinate system More... | |
| int | numberToCsY (int number) |
| converts a number on the y axis according to the currently selected coordinate system More... | |
| int | numberToCsZ (int number) |
| converts a number on the z axis according to the currently selected coordinate system More... | |
| WVector3d | w2c (WVector3d in) |
| transforms a vector from the world coordinate system to the canonical system More... | |
| WVector3d | c2w (WVector3d in) |
| transforms a vector from the canonical to the world coordinate system system More... | |
| WVector3d | w2t (WVector3d in) |
| transforms a vector from the world coordinate system to the talairach system More... | |
| WVector3d | t2w (WVector3d in) |
| transforms a vector from the canonical system to the world coordinate system More... | |
| void | setTalairachConverter (std::shared_ptr< WTalairachConverter > tc) |
| setter for the talairach converter pointer More... | |
| std::shared_ptr< WTalairachConverter > | getTalairachConverter () |
| getter for the talairach converter pointer More... | |
Private Attributes | |
| WMatrix< double > | m_rotMat |
| the rotation matrix to use More... | |
| WVector3d | m_origin |
| the offset to the point of origin More... | |
| WVector3d | m_scale |
| scaling of voxels More... | |
| WBoundingBox | m_boundingBox |
| bounding box of the wholy volume as provided by the dataset More... | |
| coordinateSystemMode | m_coordinateSystemMode |
| the currently selected coordinate system mode More... | |
| std::shared_ptr< WTalairachConverter > | m_talairachConverter |
| pointer to talairach convert for easy access More... | |
Class to provide conversion for a given coordinate in 3D space.
Definition at line 48 of file WCoordConverter.h.
| WCoordConverter::WCoordConverter | ( | WMatrix< double > | rotMat, |
| WVector3d | origin = WVector3d( 0, 0 , 0 ), |
||
| WVector3d | scale = WVector3d( 1.0, 1.0 , 1.0 ) |
||
| ) |
standard constructor
| rotMat | rotation matrix |
| origin | offset to point of origin |
| scale | voxel size |
Definition at line 33 of file WCoordConverter.cpp.
|
virtual |
destructor
Definition at line 41 of file WCoordConverter.cpp.
transforms a vector from the canonical to the world coordinate system system
| in | vector to transform |
Definition at line 158 of file WCoordConverter.cpp.
References m_boundingBox.
Referenced by t2w().
Here is the caller graph for this function:| WBoundingBox WCoordConverter::getBoundingBox | ( | ) |
Gets the bounding box.
Definition at line 51 of file WCoordConverter.cpp.
References m_boundingBox.
| coordinateSystemMode WCoordConverter::getCoordinateSystemMode | ( | ) |
getter for coordinate system mode
Definition at line 72 of file WCoordConverter.cpp.
References m_coordinateSystemMode.
| std::shared_ptr< WTalairachConverter > WCoordConverter::getTalairachConverter | ( | ) |
getter for the talairach converter pointer
Definition at line 148 of file WCoordConverter.cpp.
References m_talairachConverter.
| int WCoordConverter::numberToCsX | ( | int | number | ) |
converts a number on the x axis according to the currently selected coordinate system
| number |
Definition at line 77 of file WCoordConverter.cpp.
References m_boundingBox, m_coordinateSystemMode, and w2t().
Here is the call graph for this function:| int WCoordConverter::numberToCsY | ( | int | number | ) |
converts a number on the y axis according to the currently selected coordinate system
| number |
Definition at line 99 of file WCoordConverter.cpp.
References m_boundingBox, m_coordinateSystemMode, and w2t().
Here is the call graph for this function:| int WCoordConverter::numberToCsZ | ( | int | number | ) |
converts a number on the z axis according to the currently selected coordinate system
| number |
Definition at line 121 of file WCoordConverter.cpp.
References m_boundingBox, m_coordinateSystemMode, and w2t().
Here is the call graph for this function:Operator ()
| in | vector to convert |
Definition at line 45 of file WCoordConverter.cpp.
| void WCoordConverter::setBoundingBox | ( | WBoundingBox | boundingBox | ) |
Sets the bounding box of the volume.
| boundingBox | The axis aligned bounding box. |
Definition at line 56 of file WCoordConverter.cpp.
References m_boundingBox.
| void WCoordConverter::setCoordinateSystemMode | ( | coordinateSystemMode | mode | ) |
setter for coordinate system mode
| mode |
Definition at line 67 of file WCoordConverter.cpp.
References m_coordinateSystemMode.
| void WCoordConverter::setTalairachConverter | ( | std::shared_ptr< WTalairachConverter > | tc | ) |
setter for the talairach converter pointer
| tc |
Definition at line 143 of file WCoordConverter.cpp.
References m_talairachConverter.
transforms a vector from the canonical system to the world coordinate system
| in | vector to transform |
Definition at line 169 of file WCoordConverter.cpp.
References c2w(), and m_talairachConverter.
Here is the call graph for this function:transforms a vector from the world coordinate system to the canonical system
| in | vector to transform |
Definition at line 153 of file WCoordConverter.cpp.
References m_boundingBox.
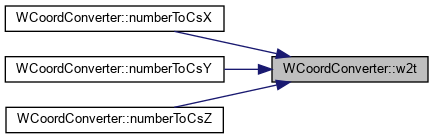
Referenced by w2t().
Here is the caller graph for this function:transforms a vector from the world coordinate system to the talairach system
| in | vector to transform |
Definition at line 164 of file WCoordConverter.cpp.
References m_talairachConverter, and w2c().
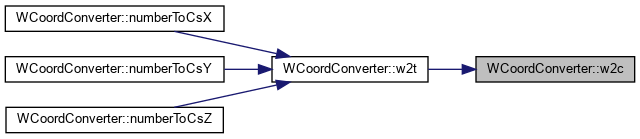
Referenced by numberToCsX(), numberToCsY(), and numberToCsZ().
Here is the call graph for this function: Here is the caller graph for this function:Transforms world coordinates.
| point | The point which will be transformed. |
Definition at line 61 of file WCoordConverter.cpp.
References m_rotMat.
|
private |
bounding box of the wholy volume as provided by the dataset
Definition at line 179 of file WCoordConverter.h.
Referenced by c2w(), getBoundingBox(), numberToCsX(), numberToCsY(), numberToCsZ(), setBoundingBox(), and w2c().
|
private |
the currently selected coordinate system mode
Definition at line 181 of file WCoordConverter.h.
Referenced by getCoordinateSystemMode(), numberToCsX(), numberToCsY(), numberToCsZ(), and setCoordinateSystemMode().
|
private |
the offset to the point of origin
Definition at line 175 of file WCoordConverter.h.
|
private |
the rotation matrix to use
Definition at line 173 of file WCoordConverter.h.
Referenced by worldCoordTransformed().
|
private |
scaling of voxels
Definition at line 177 of file WCoordConverter.h.
|
private |
pointer to talairach convert for easy access
Definition at line 183 of file WCoordConverter.h.
Referenced by getTalairachConverter(), setTalairachConverter(), t2w(), and w2t().